I am
Kealym Bromley
a 2022 Mechatronics Engineering graduate.
🤖 Robotics enthusiast
🎸 Guitar player
🧗🏼 Rock climber
📖 Driven by my thirst for knowledge
My projects
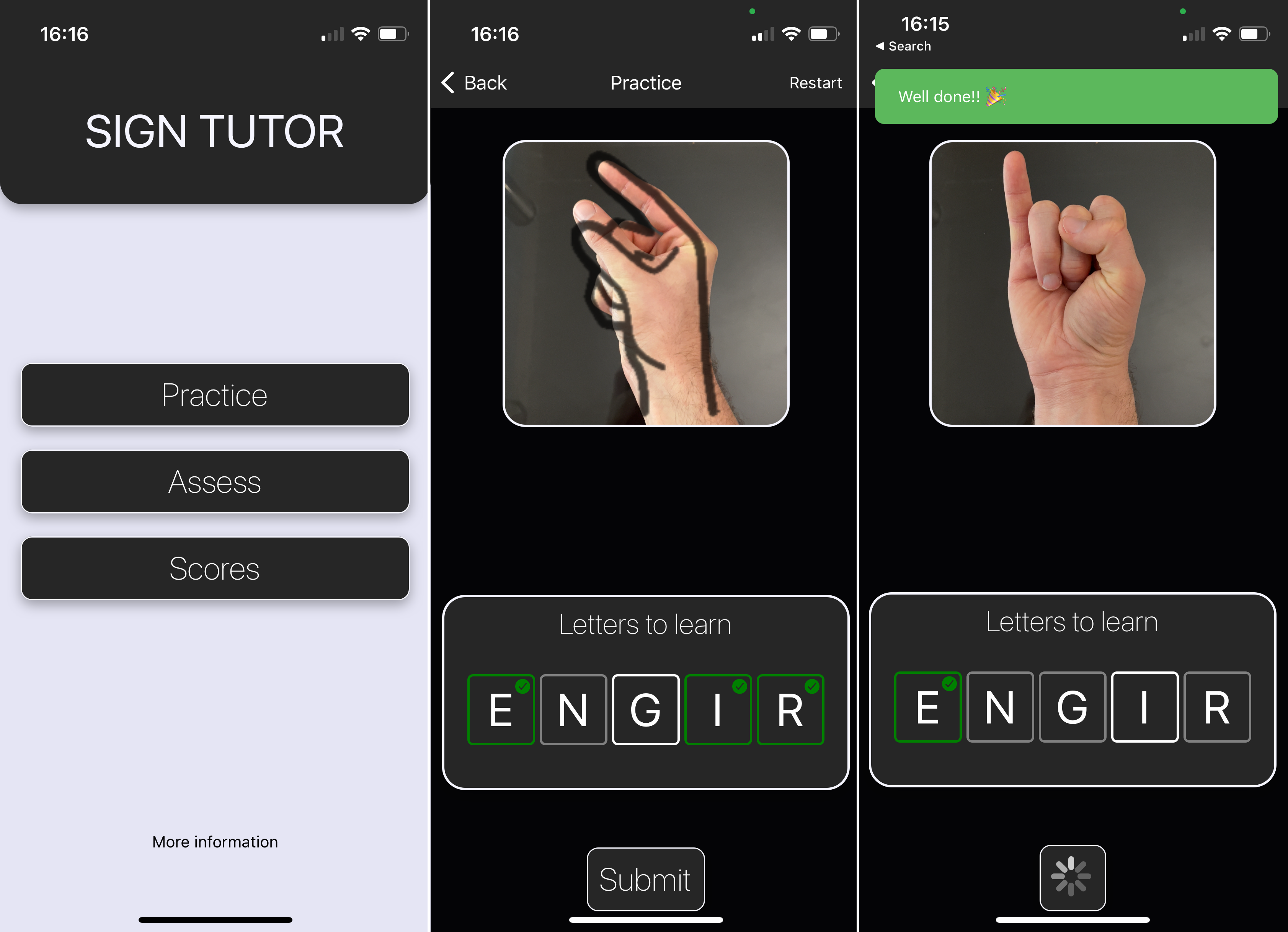
A proof-of-concept AI sign language teaching app. SignTutor teaches and tests 5 static American Sign Language letters using AI to provide feedback to the sign's correctness.
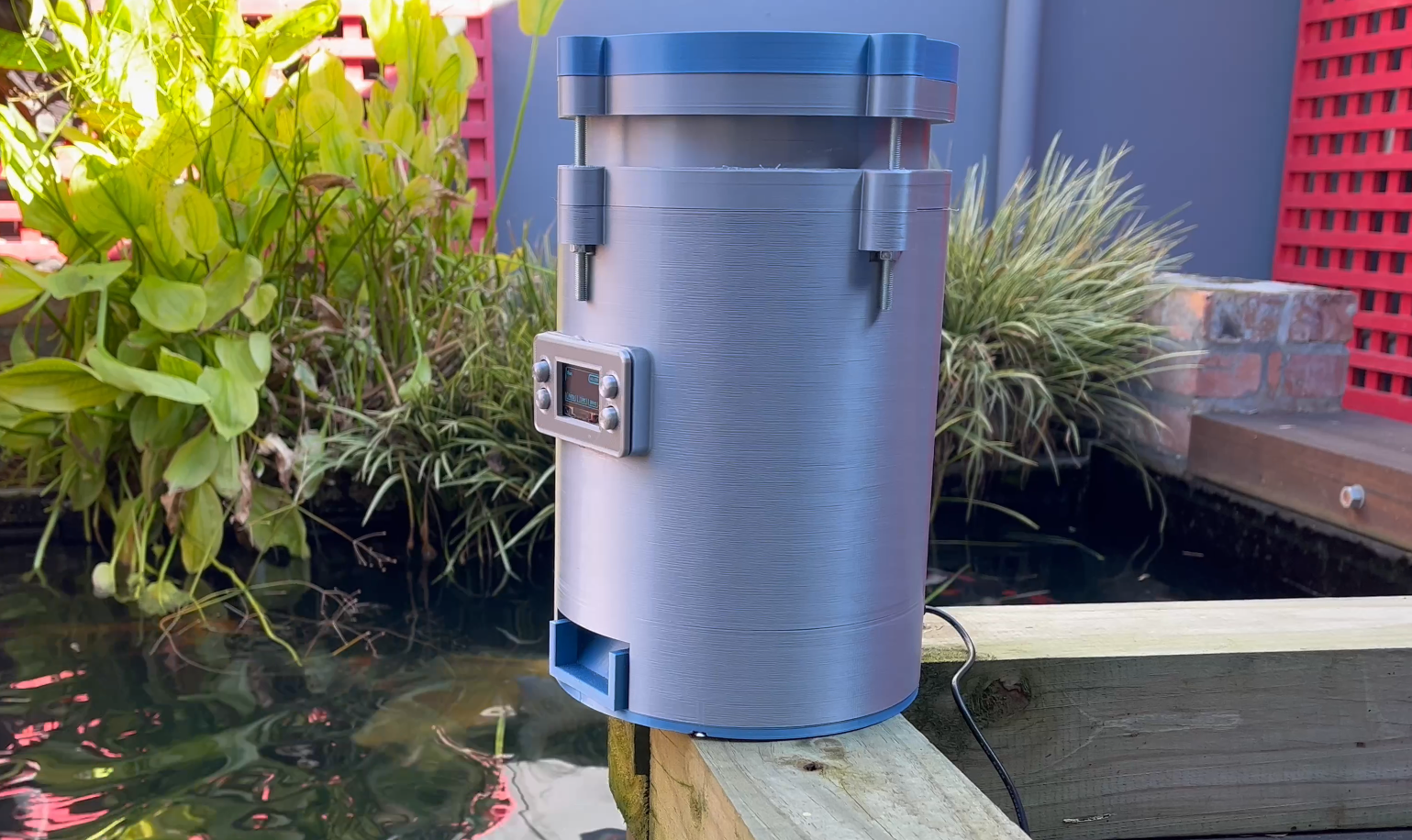
A fish feeder built to handle South African power cuts, includes an intuitive interface to set feed days, times and portion size. Utilizing a battery powered RTC to keep time while not powered and saving all settings to EEPROM to avoid data loss.
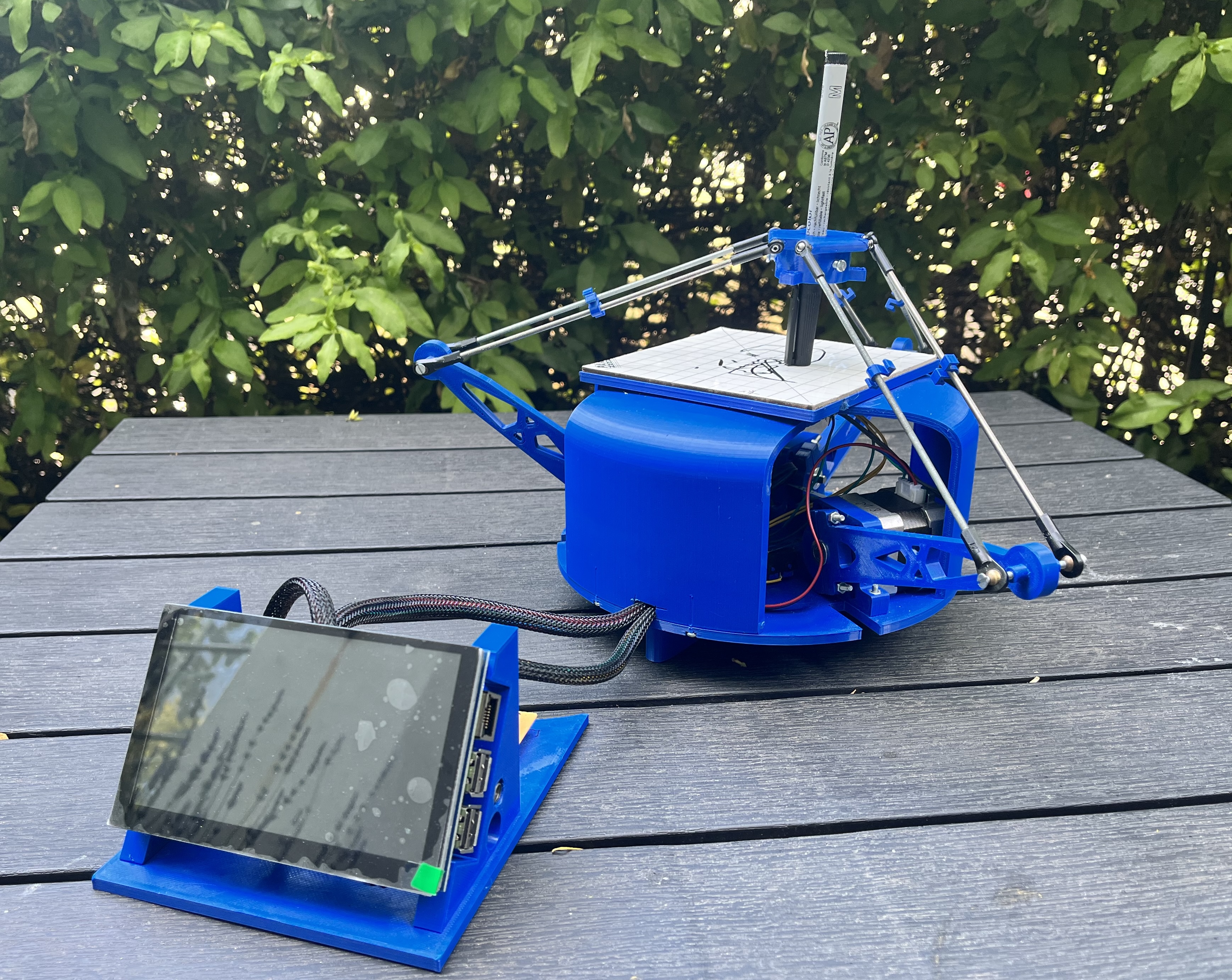
My thesis project is to design and build a delta robot that can, using AI, take a picture of a user and convert that image into a cartoon version. This 'cartoonified' portrait is then sent through a path finding algorithm and drawn by the inverted Delta robot.
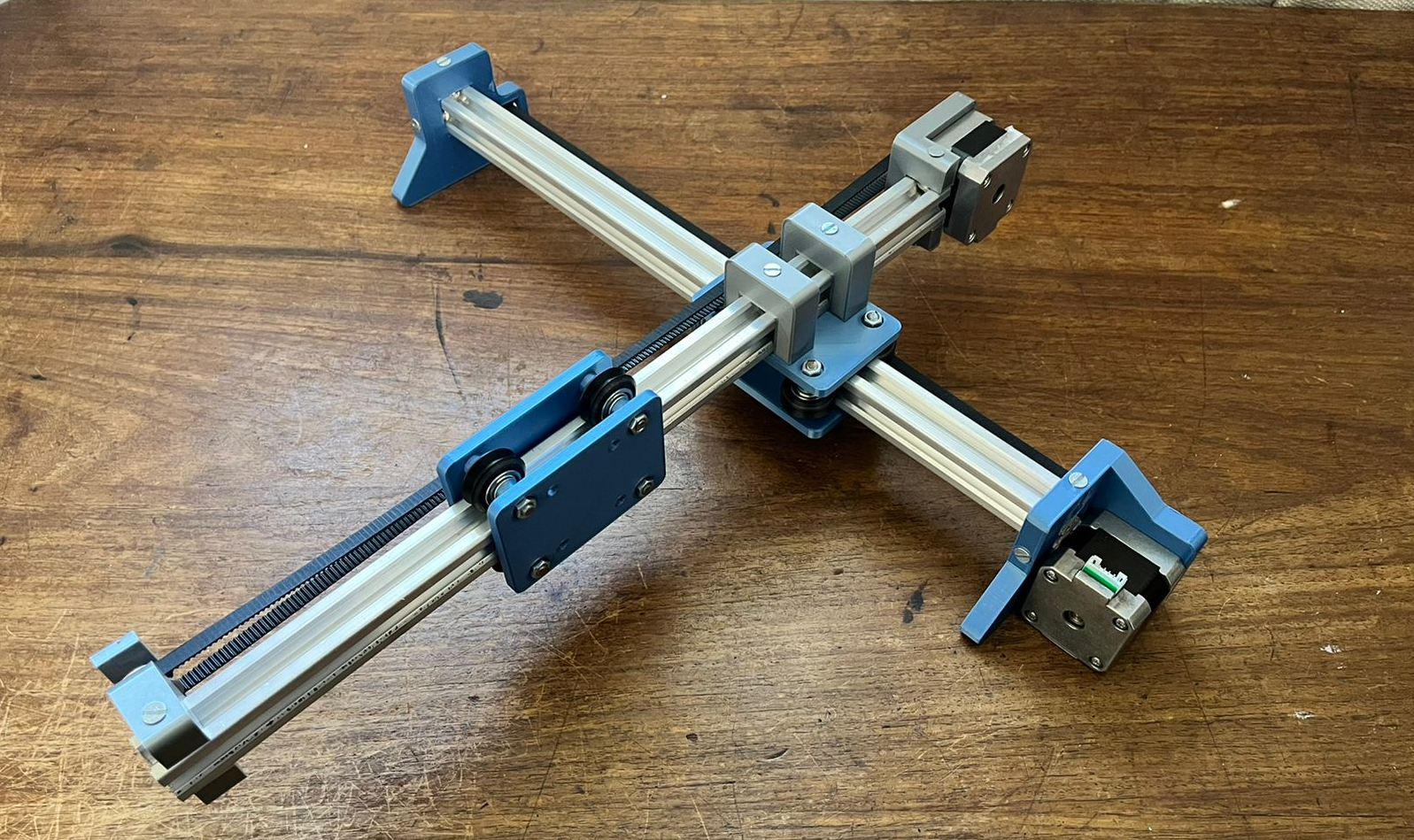
A player is able to draw their circle or cross on a piece of paper and using image recognition will show their move on the opponents app. When the opponent makes a move on the app the robot draws in that move on the physical piece of paper.
University Projects
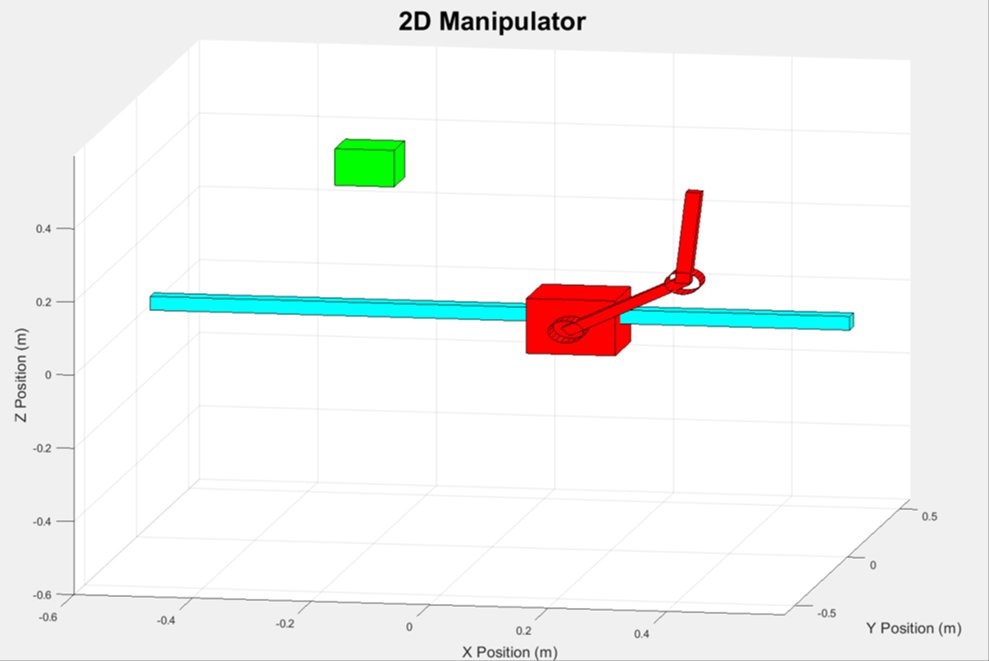
The task was to create a factory-robot controller that could pick up a package, adjust motor torques' for the package’s unknown weight and then allow an operator to set the position of the package.
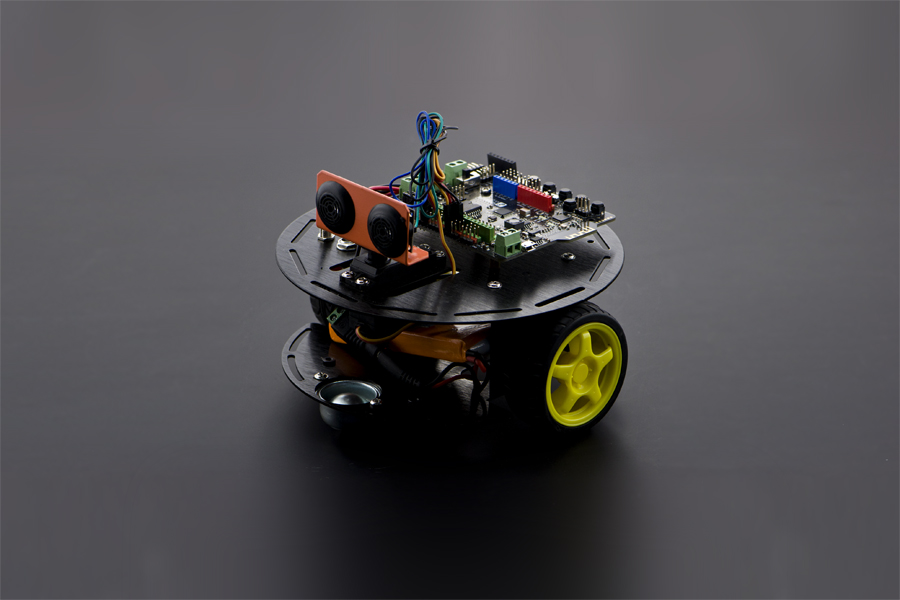
The autonomous robot, equipped with 4 line sensors and wheel encoders needed to navigate and solve a maze. Furthermore, the robot must be able to find the optimal path and then race the maze to complete it in as fast a time as possible.
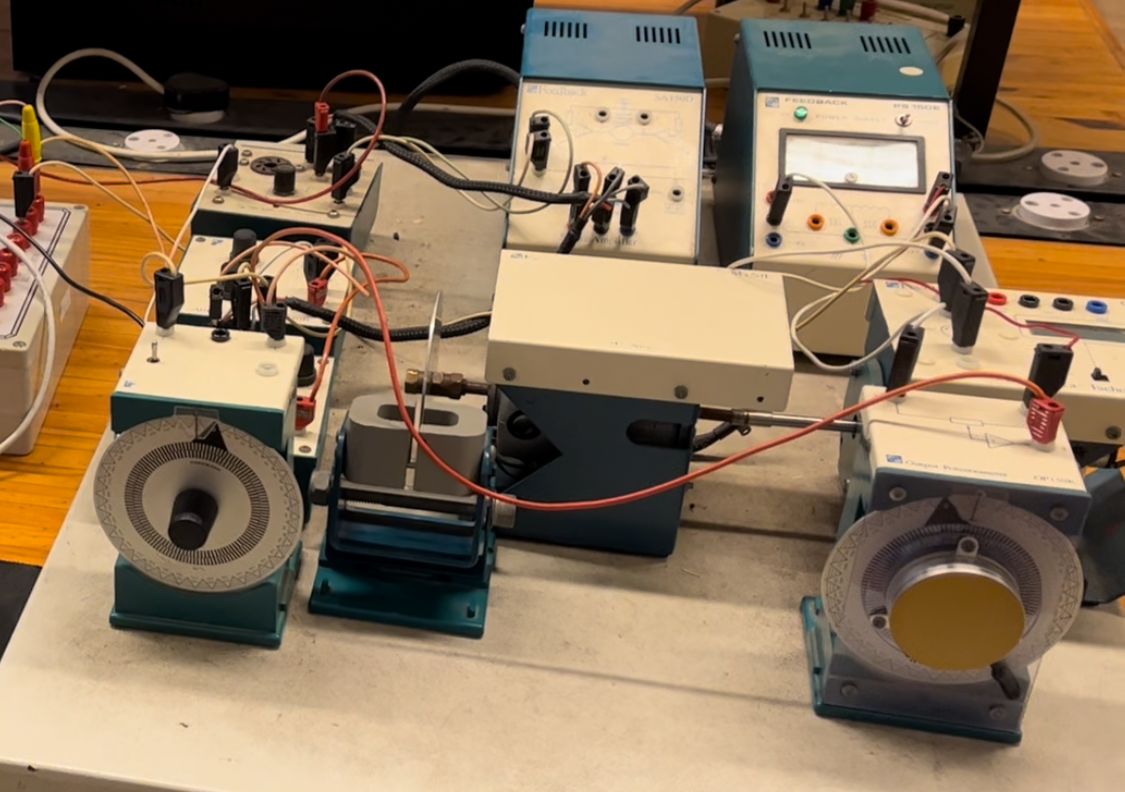
Using ladder logic to program the PLC, C# for the control algorithm and DOPsoft for the HMI, a control algorithm was developed to control the position of a motor. Allowing the operator to set the position using the HMI.
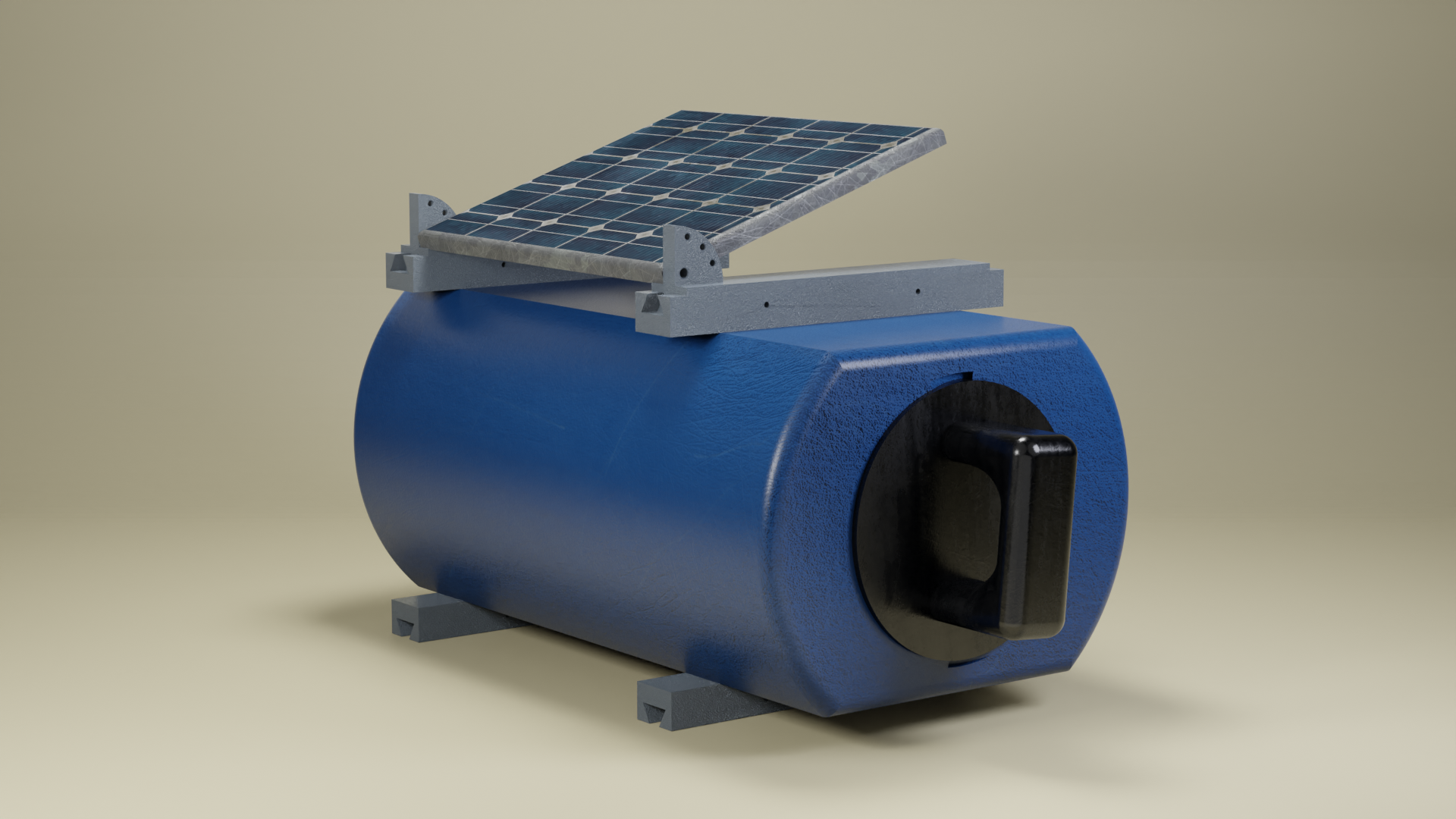
Following requirements gathered in an interview with a small scale farmer about their water problems. My team's solution was an array of smart inter-connected devices that work together to water many acres of crops efficiently.
Built by Kealym Bromley using React, MUI and VantaJS. Hosted on Netlify.